
高精度測位技術『RTK』の仕組みを図解で徹底解説!GPS・GNSSとの違いとは?

「RTK」という言葉は聞いたことがあるものの、どのような仕組みなのか、GPSとは何が違うのか、分からないという方も多いのではないでしょうか。
RTKを簡単に表すと、位置の判明している基準局の測位データを用いて測位の誤差を計算し、そのデータをもとに補正をして精度の高い測位をする方法のことです。
本記事では、RTKの特徴や仕組み、GPSとの違いを中心に詳しく解説します。

- 目次 -
◆GPSやGNSS、RTKをサックリとご紹介
GPSやGNSSというのは、どちらも衛星を利用して、地球上の位置を特定するシステム(衛星測位システム)の事を指します。広く知られているGPS(Global Positioning System)は、アメリカが開発し、運用を行っている衛星測位システムの事を指します。
一方、GNSS(Global Navigation Satellite System)というのは、アメリカの測位衛星だけでなく、日本やEU、ロシアや中国の様に、各国の測位衛星を含めて利用した、衛星測位システムの事を指します。現在では、GPSは、GNSSの中の1つの要素です。また、私たちが皆様へ提供をするRTKも、GNSSの中の測位方法の1つです。
このように、GPSは衛星測位システムを指す名称であるのに対し、RTKは測位方法を指す名称であるため、それぞれ異なる概念として理解する必要があります。
以下は、各国の測位衛星の名称です。
|
アメリカ:GPS EU:GALILEO ロシア:GLONASS 中国:BeiDou 日本:QZSS(みちびき) |
◆衛星測位システムの基本的な仕組み
次に測位衛星を利用して、位置を特定する仕組みを簡単にご紹介します。

特定の地点で、4機以上の測位衛星が発信した信号を受信する
信号には、様々な情報が含まれております。
受信機が利用する主な情報は、衛星信号がどの衛星の物かを示す「識別コード」と、信号の送信時間を示す「時刻情報」です。
識別コードと時刻情報を元に、測位衛星との距離を求める
受信した衛星信号から、送信時間と、受信機が信号を受信した時間の差を求め、その時間の差に対して、光速(光の速さ)を掛けた物が、受信機から測位衛星までの距離となります。
また、どの衛星から受信した衛星信号かを識別する為に、識別コードを利用します。

各衛星までの距離を半径とした、複数の球面より、3次元情報を計算する
各衛星までの距離を半径とした、複数の球面の交点が、3次元情報(x, y, z)です。
但し、この(x, y, z)というのは、初めから、(x : 経度, y : 緯度, z : 高度)になっている訳ではなく、数学的プロセスを経て、緯度経度座標系や、平面直角座標系に変換されます。

|
RTK基準局構築方法について詳しく知りたい方は以下のコラムをチェック! |
◆単独測位と相対測位
単独測位(コード測位)
前章で説明をした、「衛星を使って、位置を特定する基本的な仕組み」は、単独測位もしくは、コード測位と呼ばれる方法です。この方法は、特定の地点の受信機1台と、測位衛星のみで、位置を特定する測位方法になっております。
相対測位
相対測位とは、単独測位が受信機1台で、自身の位置を特定する測位方法に対して、複数の受信機で、同じ衛星から発信された信号を受信し、特定の地点にある受信機の位置を、測定する測位方法の事を指します。私たちが提供するRTKは、この相対測位の方法で、位置を測定しています。
相対測位には、D-GNSS方式と、RTK方式の2つの方法があります。
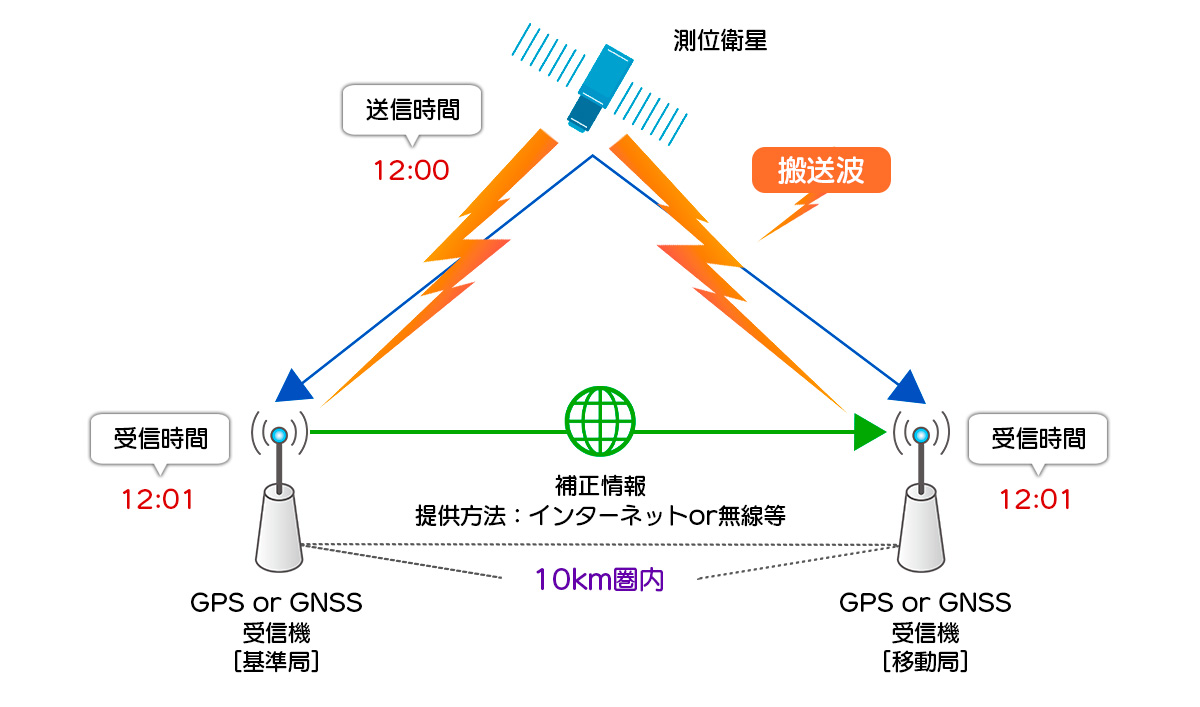
また、実際に測定したい地点の受信機とその他の受信機が半径10km圏内にある事で、衛星軌道や時計に関わる誤差を取り除き、大気層の誤差をある程度低減できる様になります。

◆RTKとは?

RTK方式
RTKはリアルタイムキネマティックの略で、衛星軌道上にあるGNSS(衛星測位システムの総称)を用いて精度が高い測位をする衛星測位方式の1種です。RTK-GNSSとも呼ばれています。
RTK(Real Time Kinematic)方式は、2つの受信機を使います。片方が正確な位置を把握している受信機である基準局で、もう片方が実際に測位したい地点にある受信機である移動局です。RTK方式では、コード測位を利用し、その上で、搬送波測位という測位方法も利用して、より高精度に衛星と受信機の間の距離を求めます。また、基準局から移動局に送られる補正情報と呼ばれるデータを送信しています。
また、相対測位において、RTK方式とは他に、D-GNSS方式というものがありますが、これは、2つの受信機を利用して、コード測位のみを利用し、位置を特定する方式です。ここまでで登場した、測位方法を、位置精度が良い順番に並べると、以下の様になります。
単独測位(コード測位):誤差数十m~
⇓
D-GNSS方式:誤差数m~
⇓
RTK方式:誤差数cm~
◆RTKの仕組み
RTKの仕組みは、前述の通り、単独測位やD-GNSS方式の原理を利用し、その上で、搬送波測位することで、高精度な位置を測位しています。
|
RTK技術の活用事例について詳しく知りたい方は以下のコラムをチェック! |
搬送波(はんそうは)測位
搬送波測位とは、受信機に届いた衛星信号の波の数を数えて、位置を特定する測位方法です。衛星から発信された信号の波は、1周期が約19cmです。当然、衛星と受信機の間は、19cmで必ずきれいに割り切れる訳では無いので、「19cmの波×波の数(整数波数) + 端数分」となります。GNSS受信機では、端数部分を、mm単位まで分解する事ができます。ここで問題になるのが、1周期が19cmと分かっていても、波の数(整数波数)は、未知数である点です。しかし、従来の単独測位やD-GNSSの原理を利用する事で、ある程度の地点(本来の地点から数m ~ 数十mの誤差がある地点)までは、特定する事ができます。

ある程度の地点まで絞り込めれば、球面の交点の組み合わせには、限りができます。後は、本来の地点の交点を選定する事ができれば、高精度な位置を特定することができます。この交点の選定において、重要になるのが、移動局と基準局の搬送波位相です。

搬送波位相 (はんそうはいそう)
搬送波位相とは、衛星信号の波の波形を指します。通常、移動局と基準局の測位地点は違うはずですので、搬送波位相には差が生じます。この差をきれいに抽出する事ができれば、移動局と基準局の相対的な位置関係がわかります。そして、移動局で測位した、実際に取得したい地点の位置(球面の交点)を求めることができます。しかし、搬送波位相に含まれる差は、測位地点の違いによる差だけではありません。

搬送波位相の差
搬送波位相の差には、以下の成分が含まれます。
●測位衛星から受信機までの距離情報(移動局もしくは基準局)
●誤差成分
・衛星軌道誤差:衛星の位置に関する誤差
・時計誤差:衛星が持つ時計と受信機が持つ時計の誤差
・電離層遅延・対流圏遅延:大気層による衛生信号の遅延誤差
・マルチパス誤差:建物や木などで、信号が反射して到達し発生する誤差
・受信機のノイズ:受信機の電子部品の熱や電磁誘導等による誤差

上記の誤差成分の中でも、衛星軌道誤差、時計誤差、電離層遅延・対流圏遅延の3つは、同じ衛星の信号を、移動局と基準局の両方で受信しているので、誤差成分のほとんどをキャンセルすることができます。但し、マルチパス誤差や受信機のノイズは、周囲の環境の影響や、受信機それぞれの特有の誤差成分となっているので、除去することはできません。
これまで説明しました、RTKの仕組みについて簡単にまとめます。
RTKの仕組み:まとめ
・コード測位を利用し、ある程度の地点を特定
・移動局と基準局の間が10km程度以内であれば、衛星や時計に関わる誤差を取り除き、大気層(電離層遅延・対流圏遅延)遅延による誤差を大幅に軽減できる
・移動局と基準局の搬送波位相の差を利用して、より高精度に位置を測定
◆最後に
今回のコラムでは、RTK測位技術の基本的な仕組みと、GPSやGNSSとの違いについて解説しました。RTKは従来のGPSによる単独測位に比べ、高精度な位置情報をリアルタイムで提供できる点が特徴です。
本記事を通じて、RTK技術の利便性や重要性について理解が深まれば幸いです。
弊社でのRTKを基軸としたソリューションは、まだ、始まったばかりです。
しかし、皆様が抱える位置情報のお悩み事と、その解決方法を、FIXさせながら今後も取り組んでまいります。
更新日:2025.01.24