
基準局構築の方法や測位の実践手順を知りたい方必見!RTK-GNSS測量の簡単な手順を解説

今回のコラムでは、RTK基準局の簡易的な構築の仕方を説明します。また、市販のGNSSサービスとも比較を行い、どういった違いが発生するのかも見ていきます。
なお、位置を求める仕組みについては、下記のコラムで説明しておりますので、本コラムを閲覧される場合は、是非、ご参考にして下さい。
注意事項:
本コラムは、基礎的なRTK法に基づく測量方法の流れを理解できている方向けです。RTKに必要な機材を初めて触る方が、本コラム(のみ)を読み取り、RTK法を用いた測量を実施する際は必ず、その他の記事や先駆者様のブログ等も合わせて活用しながら、実施して下さい。

- 目次 -
1.準備するもの
RTK計測を行っていく上で必要になるものをご紹介します。
(1)アンテナ
まず、RTK基準局を構築するうえで、必要なものをご紹介します。
1つ目は、アンテナです。GNSSアンテナにもいくつか種類があり、持ち運びに優れた小型のヘリカルアンテナから、電子基準点にも利用されている大型のチョークリングアンテナまで、様々なアンテナがあります。
ヘリカルアンテナ(HX-CU7603A2)

サーベイトリプルバンドアンテナ(HX-CSX601A)

(2)GNSS受信機
受信機によって、衛星信号を受信する感度が変わり、受信できる周波数の種類が増減します。

(3)ケーブル
アンテナと受信機を繋ぐケーブルも用意が必要です。当然ですが、受信機とアンテナの仕様に合った物が必要です。

(4)PCまたはスマートフォン
主に、受信機の設定や座標の算出に利用します。ただこちらは、受信機によっては全く必要がない場合もあります。
(5)データ解析ソフト
RTK基準局を作成する際に、データを収集して、解析作業を行いますので、その為に、解析ソフトが必要になります。
今回私どもが利用する機材は、以下のとおりです。
■アンテナ:HX-CSX601A
■GNSS受信機:Drogger RZS.D
■同軸ケーブル:RG58/U 10m
■パソコン:windows11 ノートPC
■解析ソフト:Drogger Processor
■スマートフォン:Android 14
■GNSS受信機操作用アプリケーション:Drogger GPS
上記は、RTKを行う為に必要な基準局の資材です。
移動局用の資材として、RTK基準局用の資材とは別に、GNSSアンテナ、同軸ケーブル、GNSS受信機、(必要に応じて)スマートフォンなどの移動局操作用端末が、必要です。
2.検証について
本コラムでは、以下の様な検証を行いました。
検証1:圃場周辺での歩行トラッキング
北海道の農家様にご協力頂き、農家様所有の圃場周辺を歩き、トラッキングデータを収集しました。そのデータを地図上にプロットしました。
検証2:トラクターの移動トラッキング
前述の農家様にご協力頂き、農家様のトラクターの屋根部分にGNSS受信機を設置し、その移動軌跡をトラッキングしました。こちらも、地図上にトラッキングデータをプロットしました。
3.RTK基準局の構築
RTK基準局は、基準局の役目を担ってくれるGNSS受信機を、開空状況の良い場所に設置するだけで完成、という訳ではありません。基準局は、自身の正確な位置を把握している必要があるので、その設定や、移動局へ補正情報を送信するための、補正情報の配信方法を設定する必要があります。
(1)データの収集
基準局の位置決めは、スタティック測量で行います (スタティック測量に関しては後ほど説明いたします)。スタティック測量を行うには、GNSS受信機を設置後、設置したGNSS受信機で1時間~2時間程度、データを収集し続ける必要があります。また、当然ですが、基準局を移動させてしまうと、この作業をもう一度やり直す必要があるのでご注意ください。
☆データ収集のやり方
データの収集は、Drogger GPSで実施します。
①設定画面の開き方
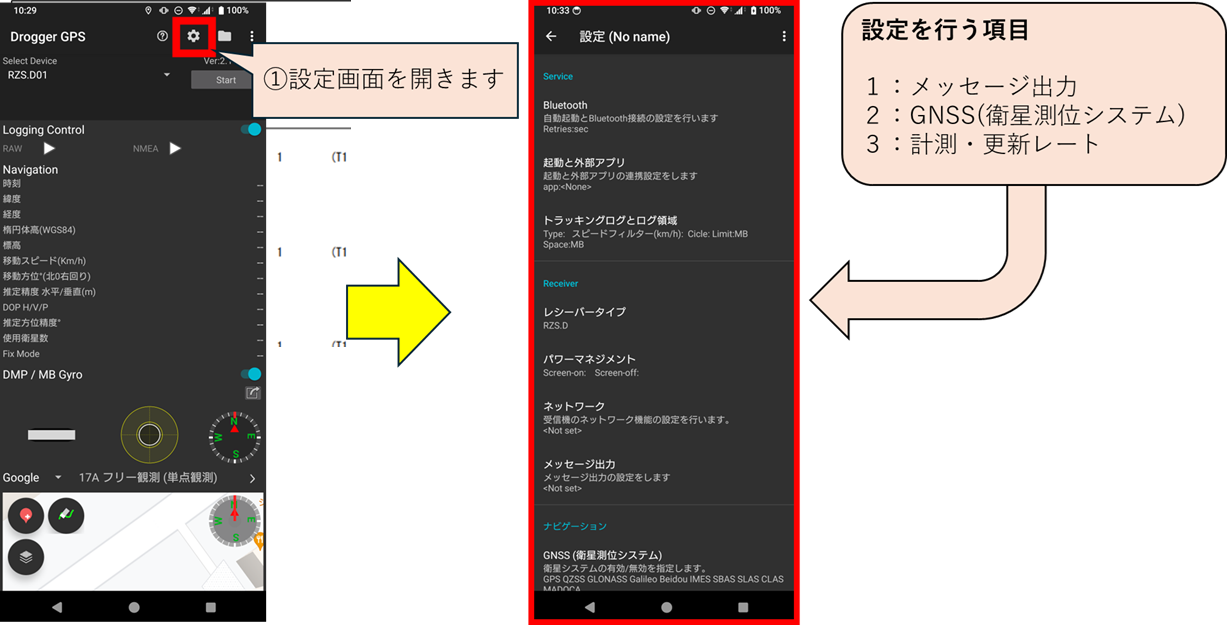
②設定内容
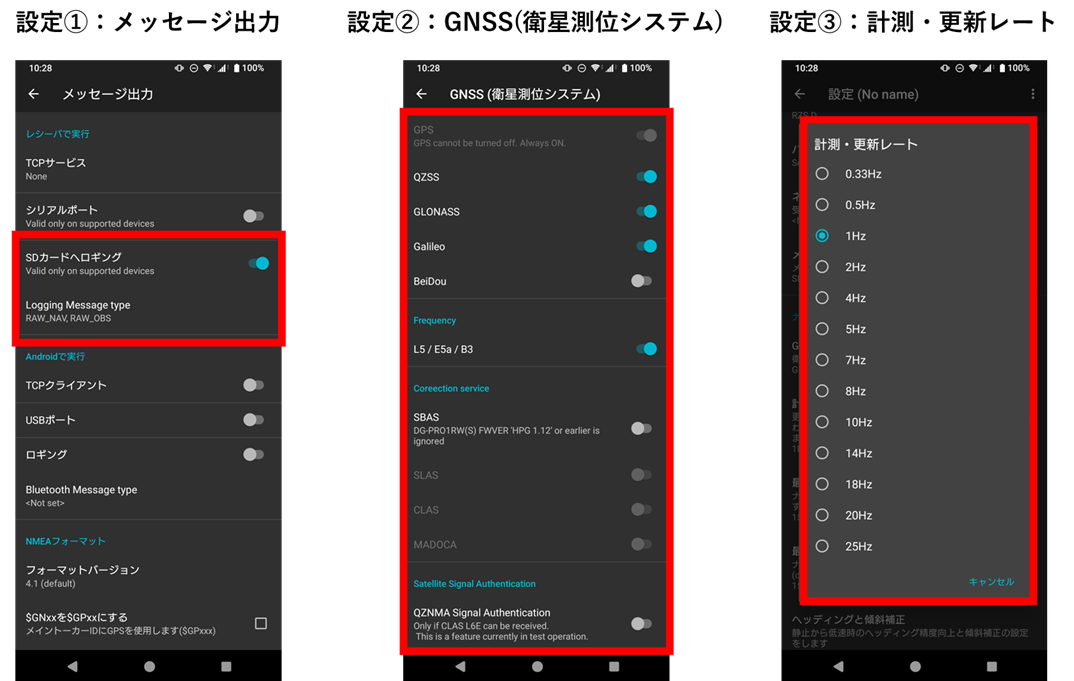
このコラムでの基準局を作成する際に設定した設定内容です。必要に応じて、上記3つの設定を変更してください。また、設定完了後、アプリのホーム画面に戻り、「Start」ボタンを押すと、自動的に観測(GNSSデータの収集)が開始されます。
(2)スタティック測量
スタティック測量は、GNSSを用いた測量手法の1つです。
①スタティック測量の特徴
この測量にも、複数のGNSS受信機を利用します。
1つ目の受信機では、三角点や電子基準点などの様な、既に位置が分かっている点で、観測を行います。次に、実際の測定したい地点でも、1つ目と同時に観測を行います。観測する時間は、前述の「データの取集」の節でもお話しした通り、1時間~2時間程度が目安です。また、観測時間が長ければ長いほど、実際に測定したい地点を精度良く求める事ができます。
②長時間の観測が必要な理由
データの観測が終了後、既知の点で観測を行ったデータと実際に測定したい地点で観測を行ったデータを使って、基線解析を行います。
解析を行う際に、長時間の観測データを用いることで、大気層やマルチパスから受ける誤差要因を平均化し、誤差影響を大きく低減させることが可能になります。衛星の配置が不均一な状態(例:衛星が全て東側に集まっている状態など)になると、精度が低下してしまいますが、長時間の観測を行うことで、衛星の配置が改善され、精度が向上することがあります。
また、観測開始時点では、利用できなかった測位衛星も、時間と共に配置が変化し、利用できるようになります。その為、より多くの衛星を使って、測定したい地点を求める事ができるので、精度が向上します。
(3)基線解析(きせんかいせき)
収集したデータを解析する必要があります。これは基線解析と呼ばれ、既知点と実際に測りたい地点の距離と方向を高精度に計算するプロセスです。
☆解析の目的
前節「スタティック測量」の中でもありますが、目的は主に2つです。
・既知点と実際に測りたい地点の相対的な位置関係を求めること
・誤差要因を平均化し、誤差影響を大きく低減させること
基本的に解析は、ソフトウェアが自動で行います。但し、解析を行うにあたって、最終的な位置を決める際に、最も良い地点を導き出す為には、解析のパラメータの調整が必要です。
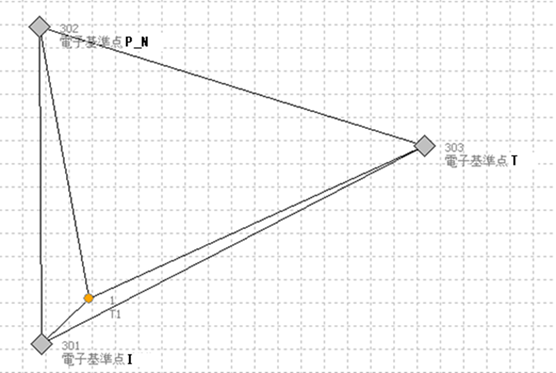
実際に測定したい地点は、T1という名前で記されているオレンジ色の点です。また、今回は、既知点の観測データは、電子基準点のデータを利用しました。利用した電子基準点(イニシャル)は、P_N、T、Iの3点です。
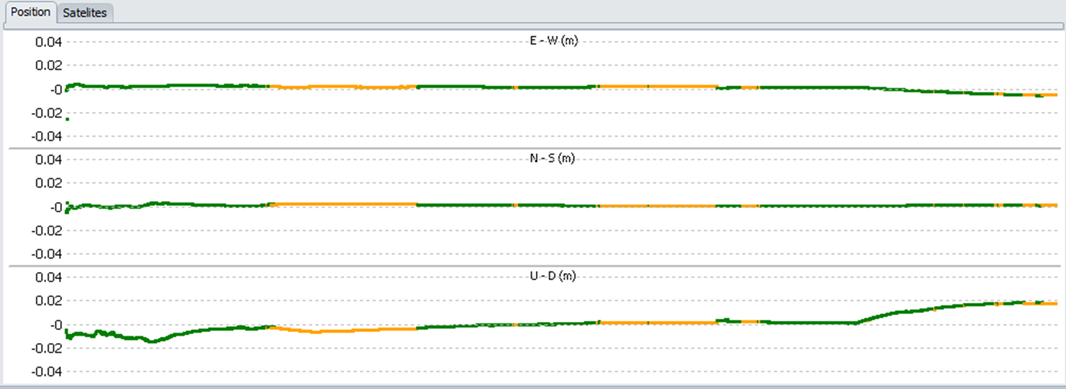
電子基準点のそれぞれの地点で、観測したデータを基線解析し、グラフ化して、解析データができるだけ安定した結果となる様にパラメータを調整します。
□T1 – Tの基線解析グラフ
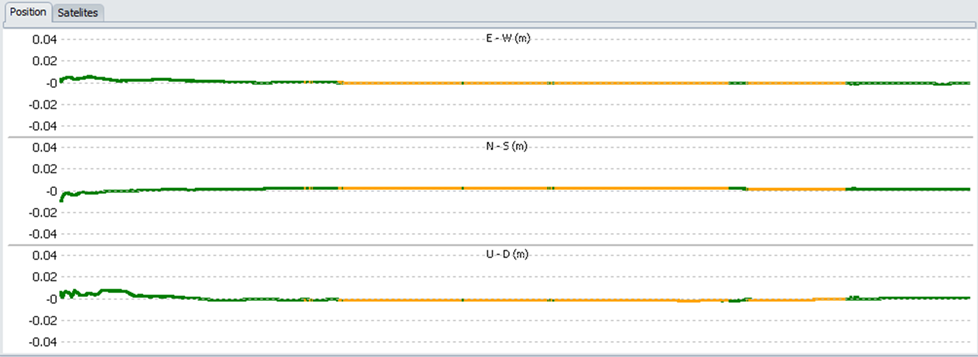
□T1 – Iの基線解析グラフ
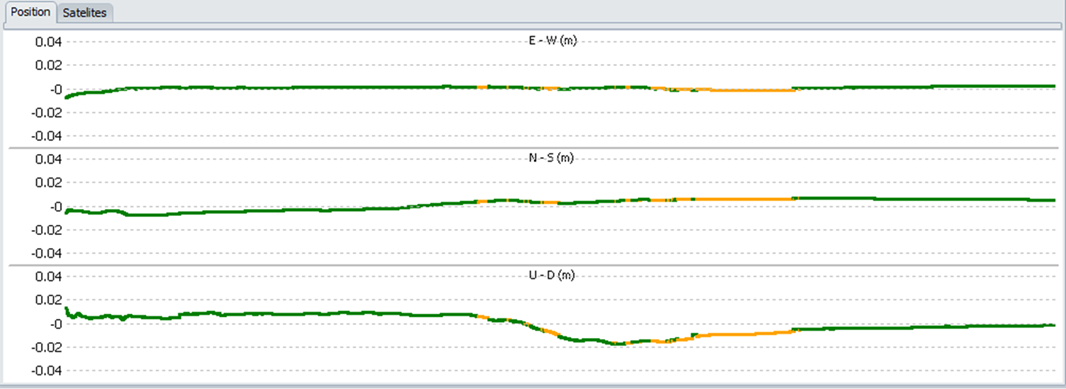
□T1 – P_Nの基線解析のグラフ
☆基線解析のやり方
①セッションの作成
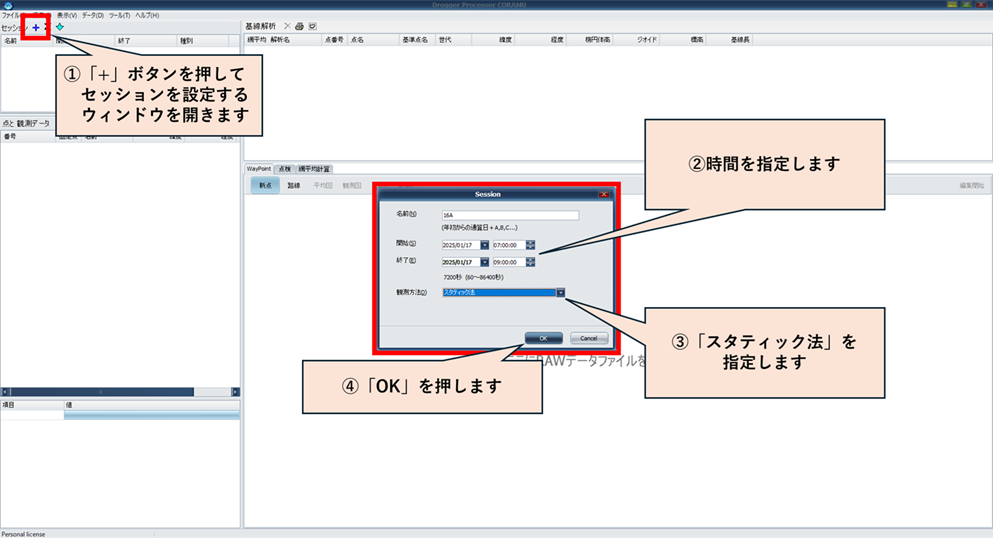
セッションとは、どの時間からどの時間までの観測時間を利用して、解析を行うか指定するプロセスです。
②観測データの挿入
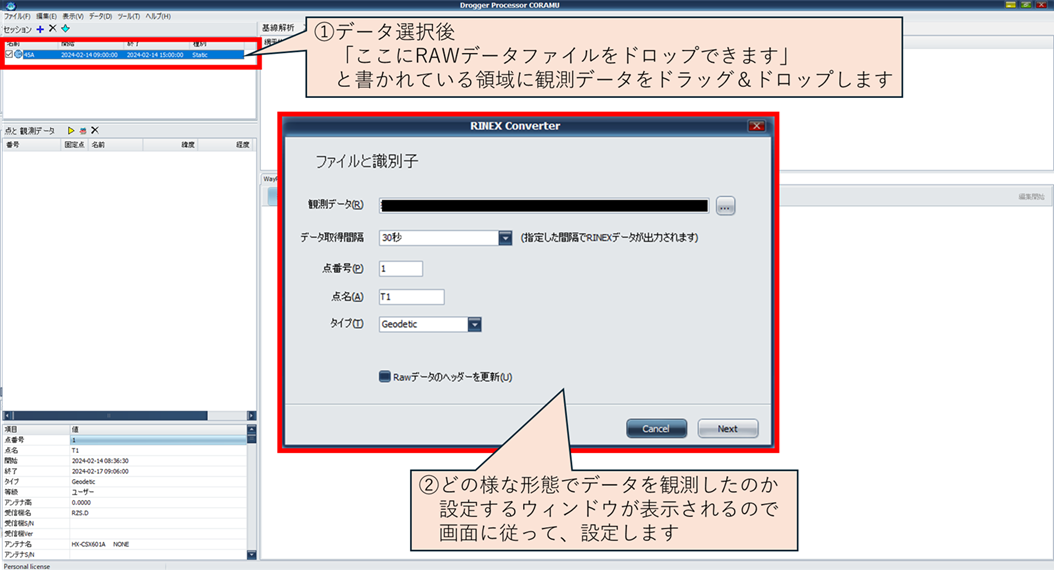
アンテナの設置状況や、どれくらいの間隔でデータ観測を行っていたかを問われるので、状況に合わせて設定します。
③基線解析
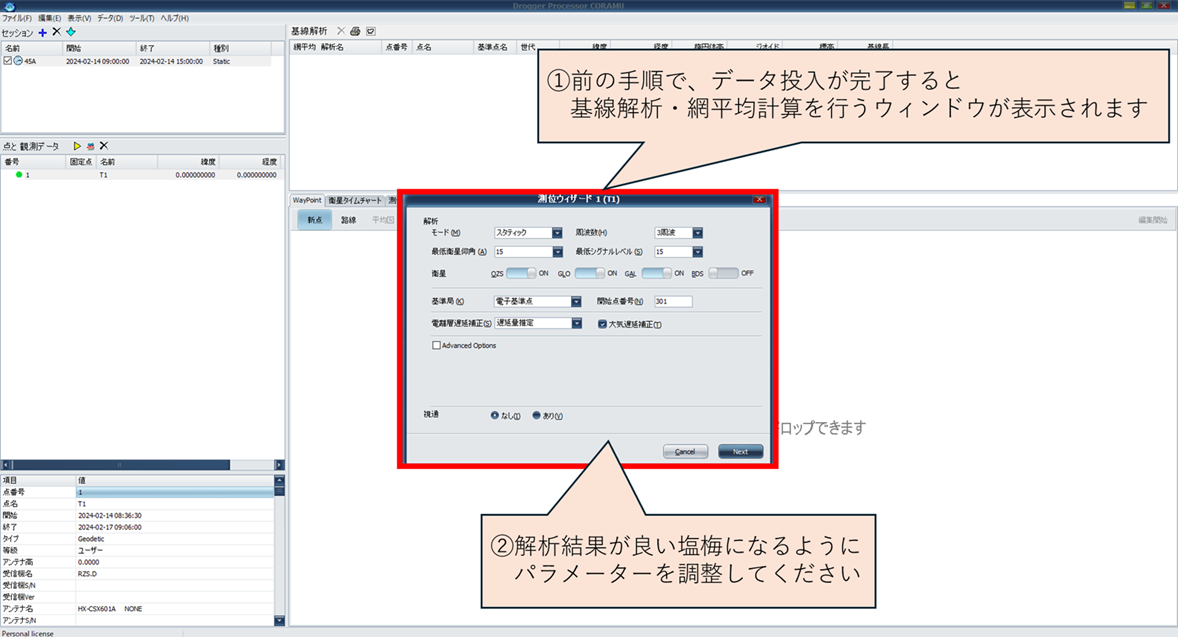
上記のパラメータの調整を、具体的に列挙すると以下の様になります。
ア.衛星の種類の選定
スタティック測量をする際に、設定した衛星のみ有効にしてください。また、基線解析の結果が悪かった場合は、GPS + QZSSのみ有効にする等して、パラメータを調整してください。
イ.電離層遅延補正の選定
Drogger Processorをご使用の場合は、「遅延量推定」もしくは「遅延量推定Ex」の、どちらか一方を選択します。こちらも、基線解析の結果が悪かった場合は、選択していない方を選択してみるなど等して、結果が最も良い状態になるまで調整する必要があります。
上記の調整を行い、「点検」のタブより、以下の状況になる様にパラメータを調整して下さい。
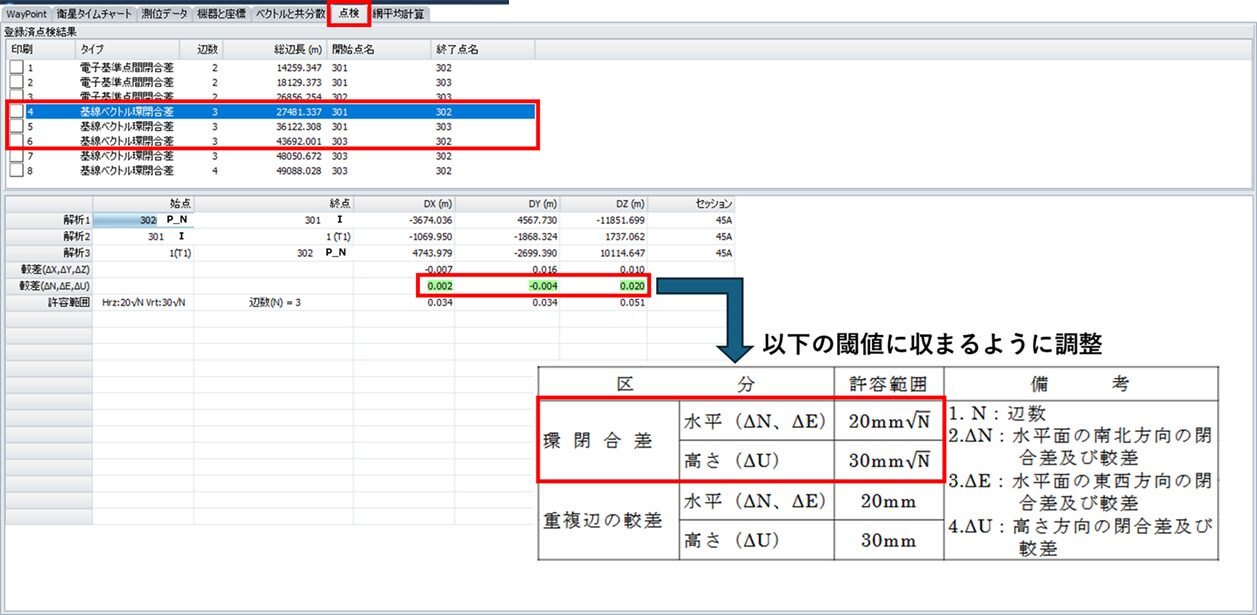
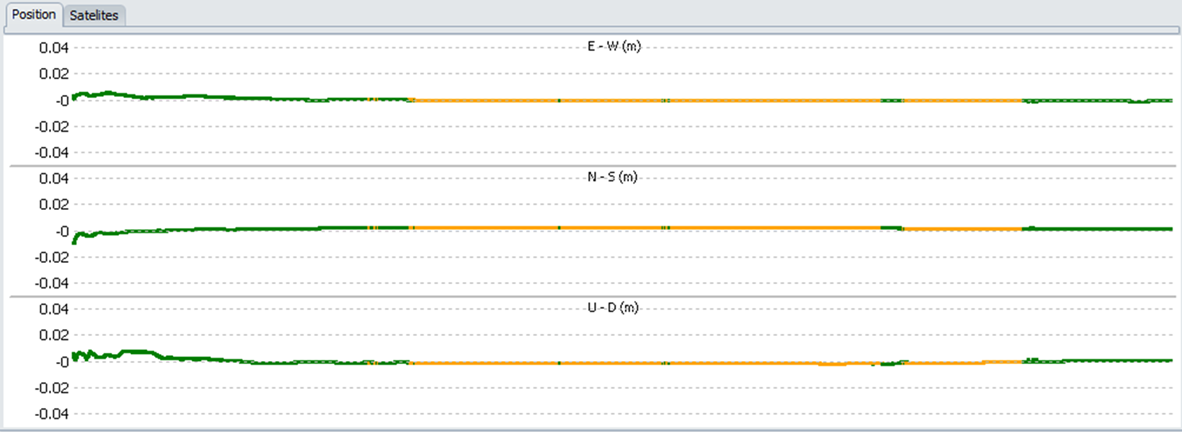
また、前述のとおり、測位データの波線グラフが、以下の様に、それぞれの図の真ん中で、緑の線がなるべく多く、かつ真っすぐな線になっている事も重要です。
基線解析の調整が終わったら、網平均計算を行い、基線解析の結果を集約したのち、既知点と実際に測定したい地点との位置関係を整理します。これらの基線解析・網平均計算のプロセスは、上記画像の手順で、全て自動で実施されます。
(4)網平均計算(もうへいきんけいさん)
網平均計算とは、基線解析で求められた結果を網状に結び、得られた解析結果の位置関係を整理することです。また、位置関係を整理するにあたって、既知点にて求めた計測結果を含め、精度評価を行い、最終的な位置もこの網平均計算のプロセスの中で決定します。
こちらも基線解析と同様、ソフトウェアが、自動的に行ってくれます。
まず、網平均計算の結果で得られる例をいくつかご紹介します。以下は、基線ベクトルの平均値をリストにした状態です。
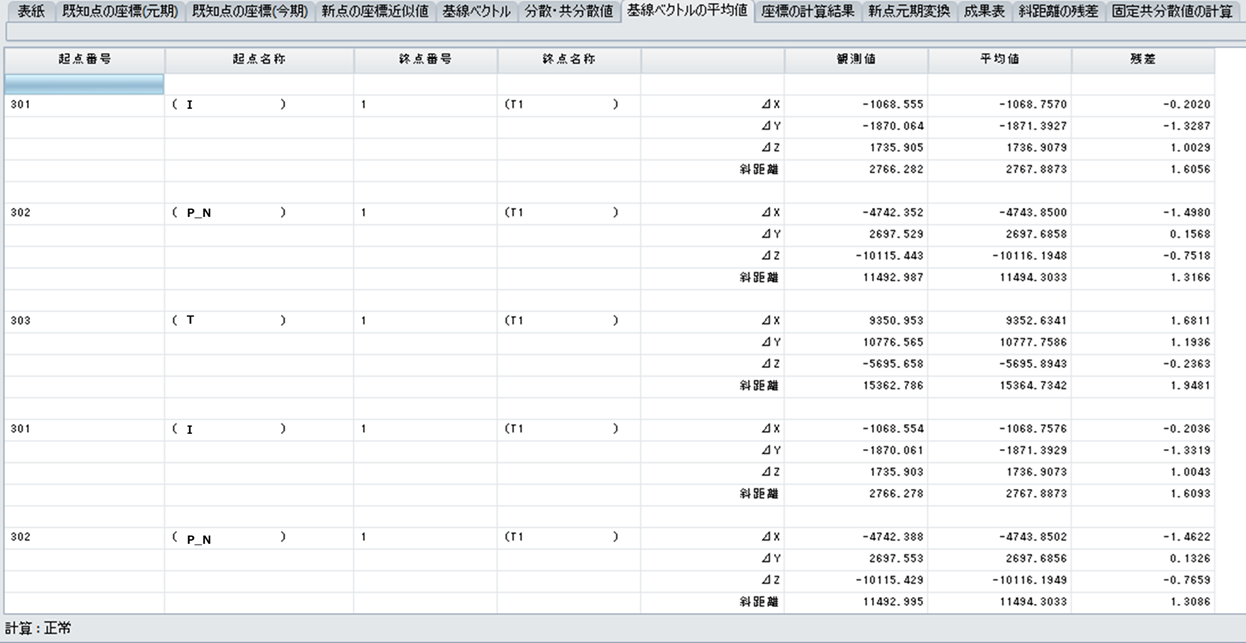
基線ベクトルの平均値とは、それぞれの既知点から実際に測定したい地点へのベクトル(方向)の平均値です。日本で観測を行った場合は、基本的には、以下の関係を示していると考えてください。単位は、メートルです。
・ΔX:東西方向を示しています。
既知点から東に進めば正、西なら負
・ΔY:南北方向を示しています。
既知点から北に進めば正、南なら負
・ΔZ:上下方向を示しています。
既知点から南に進めば正、北なら負
・斜距離:既知点から実際に測定したい地点までの直線距離を示しています。
地図上での直線距離ではなく、地形を無視した直線距離です。
以下は、既知点と実際に測りたい地点を求めて得られた、座標の結果です。
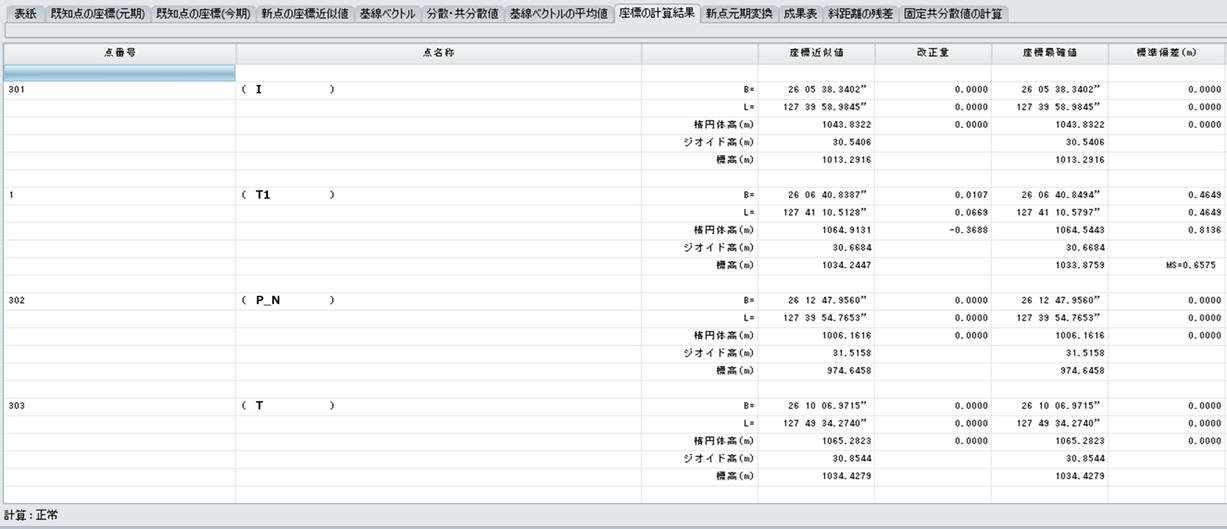
最終的な位置座標の計算結果を示しています。
それぞれ、暫定で求めたT1の座標や、最終的な座標値が記されています。中でも、観測結果のバラつきが、標準偏差の形で表されています。標準偏差は、精度の良し悪しを判断する1要素としても扱われる、非常に重要な要素です。
☆網平均計算のやり方
前節にある通り、網平均計算は、基線解析を行った際に、合わせて実施されます。そちらの手順をご参考ください。
(5)位置決め・基準局設定
基線解析・網平均計算まで済めば、残るは位置決めと基準局の設定を行うのみです。早速、やり方を確認します。
☆位置決めのやり方
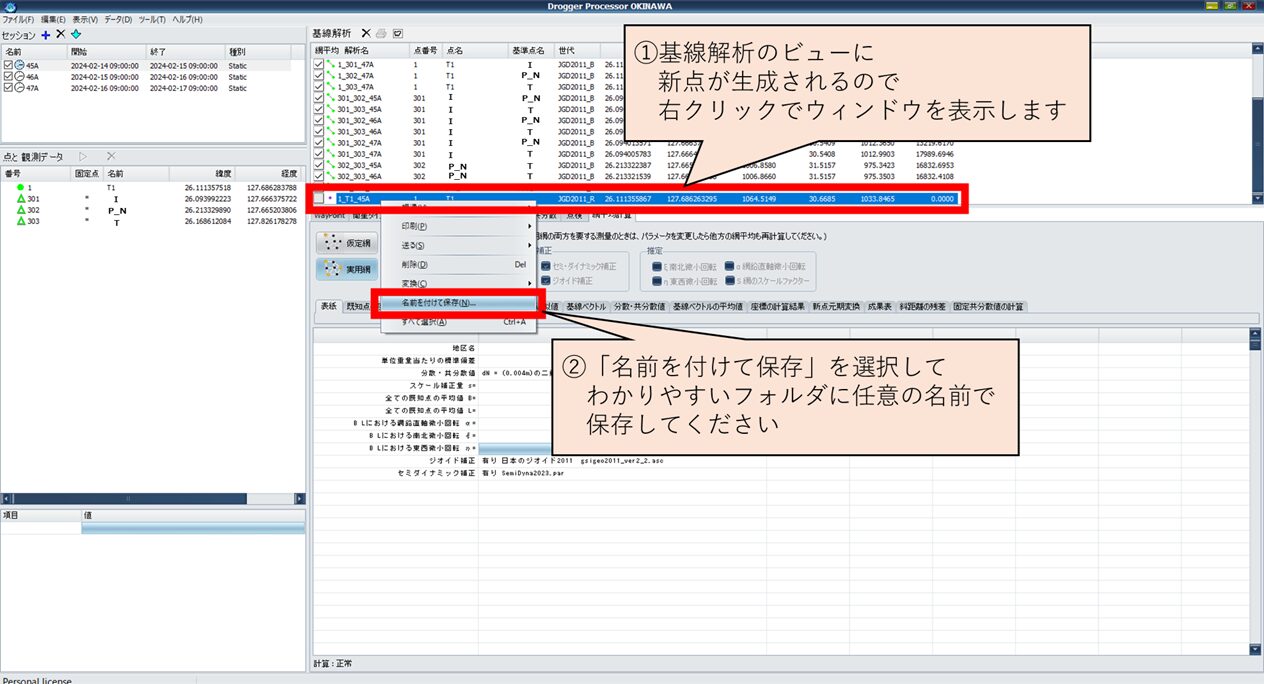
①新点(基準局の既知点となる点)の生成
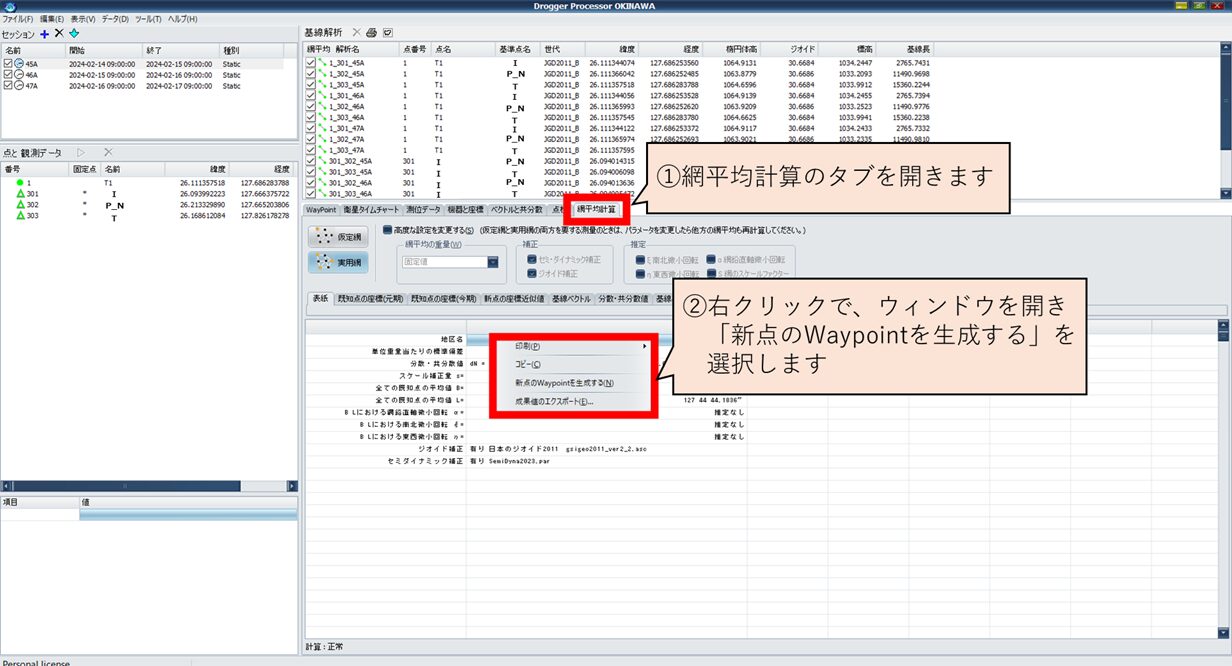
②新点の保存
☆基準局設定
いよいよ基準局の設定です。
今回は、RTK基準局の補正情報をインターネット通じて配信します。必要に応じて、TCP通信を用いた端末間通信やBluetoothを用いた近距離配信の設定を行って下さい。なお、RTK基準局の補正情報をインターネット通じて配信するには、Ntrip Casterと呼ばれる中継局が必要になります。
ア.新点データの挿入
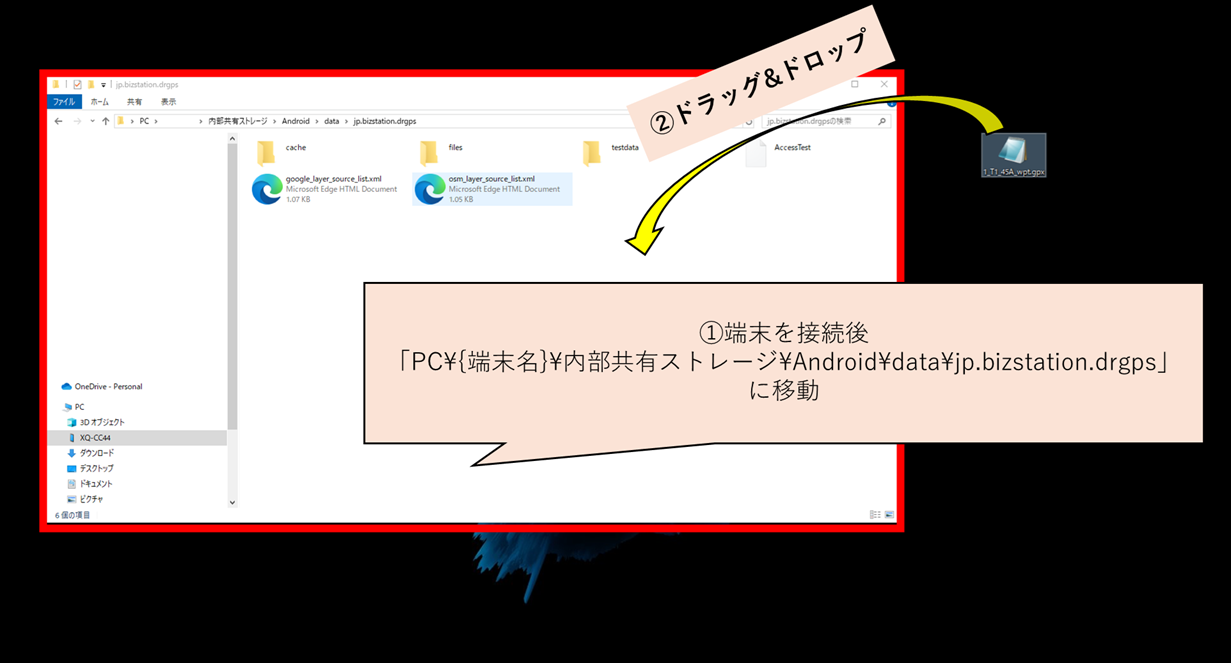
本コラムの検証用で使う基準局設定用のアプリケーションでは、設定端末接続後以下のフォルダに、新点データを配置しました。「PC\{端末名}\内部共有ストレージ\Android\data\jp.bizstation.drgps」
イ.設定内容の確認

RTK基準局として運用する為の設定内容です。また、「RTK」の設定において、「RTCMタイプ」と「RTCM1008」は、必要に応じて変更してください。「基準局アンテナ位置」と「基準局用キャスターホスト」の設定項目から、次の設定に続きます。
「基準局アンテナ位置」の設定内容

「基準局用キャスターホスト」の設定内容
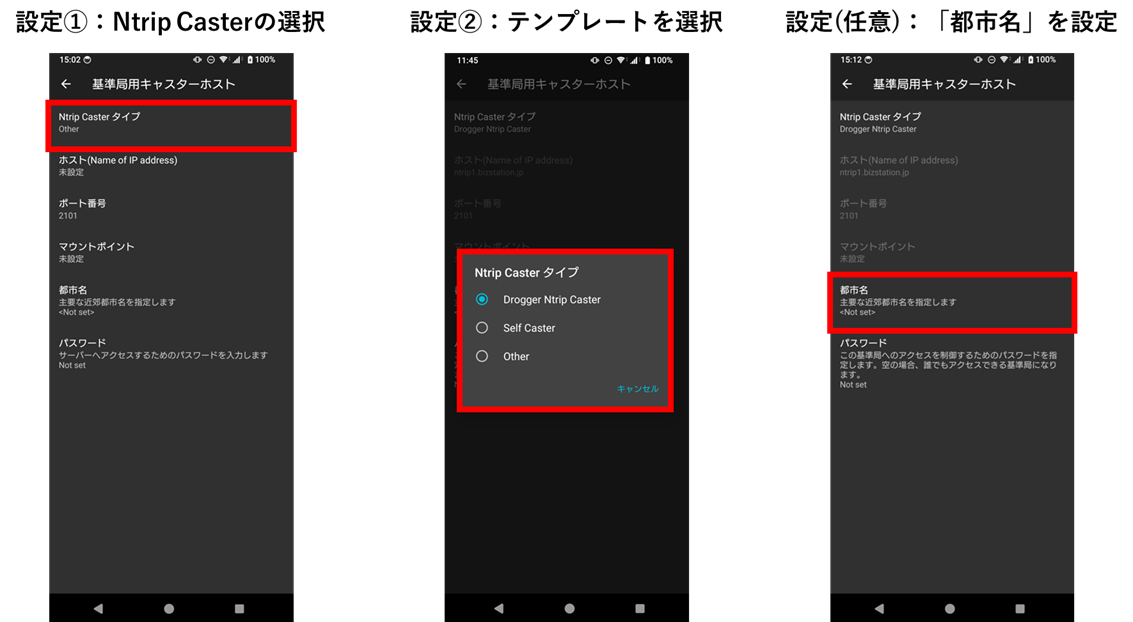
ここまで、設定が完了したら、アプリのホーム画面に戻り、「Start」ボタンを押すと、自動的に基準局として、動作を開始します。

4.RTK計測
データの収集から基線解析、網平均計算、基準局の始動のステップを終えると、いよいよRTK計測が行えるようになります。
(1)比較方法の説明
ここでは、本コラムで簡単な検証を行いましたので、その方法を説明します。
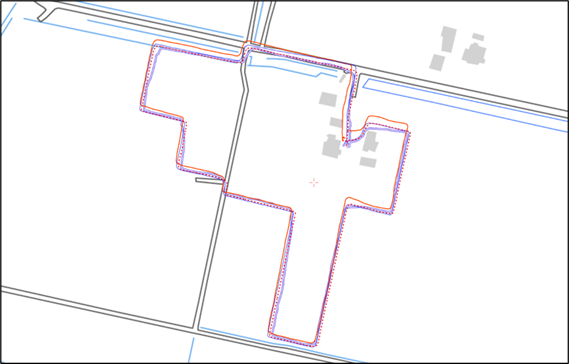
検証1:圃場の周りを歩いてトラッキング

圃場の盛り土部分を並んで歩きました。
前方の4名がそれぞれ、自前のRTK基準局を使ったGNSS受信機、市販のGNSSサービスを使ったGNSS受信機、補正情報は受け取っていないGNSS受信機、スマートフォンのGPS、の4種類で位置情報の測位データを収集しながら、歩行しています。
なお、全員のアンテナを、GNSSスプリッターを用いて、1つにまとめる様なことはしていませんので、若干のずれが発生することを念頭に置く必要があります。
※トラッキング検証協力:株式会社ファルコン様
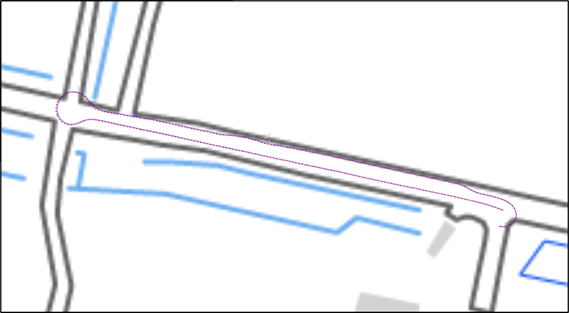
検証2:トラクターの移動をトラッキング

トラクターの屋根部分にGNSSアンテナを2つ取付、1つは、自前のRTK基準局を利用しました。もう1つは、市販のGNSSサービスを利用した物を準備しました。
(2)いざ、検証!
実際に検証を行った結果です。まず、検証1の結果から説明します。
検証1

上記は、前述の「検証方法の説明」の部分で取得できたトラッキングデータを、地図上にプロットしたものです。プロットされている線から見てわかる通り、RTKを使っていないものに関しては、圃場の盛り土から、5m以上離れた地点をトラッキングしてしまっています。
一方、RTKのトラッキングに関しては、作業員がGNSS受信機を持っている位置が若干違うので、若干のずれはあるものの、ほとんどズレは見られません。
検証2
トラクターの上にGNSS受信機を2台設置し、それぞれトラッキングデータを取得した結果です。
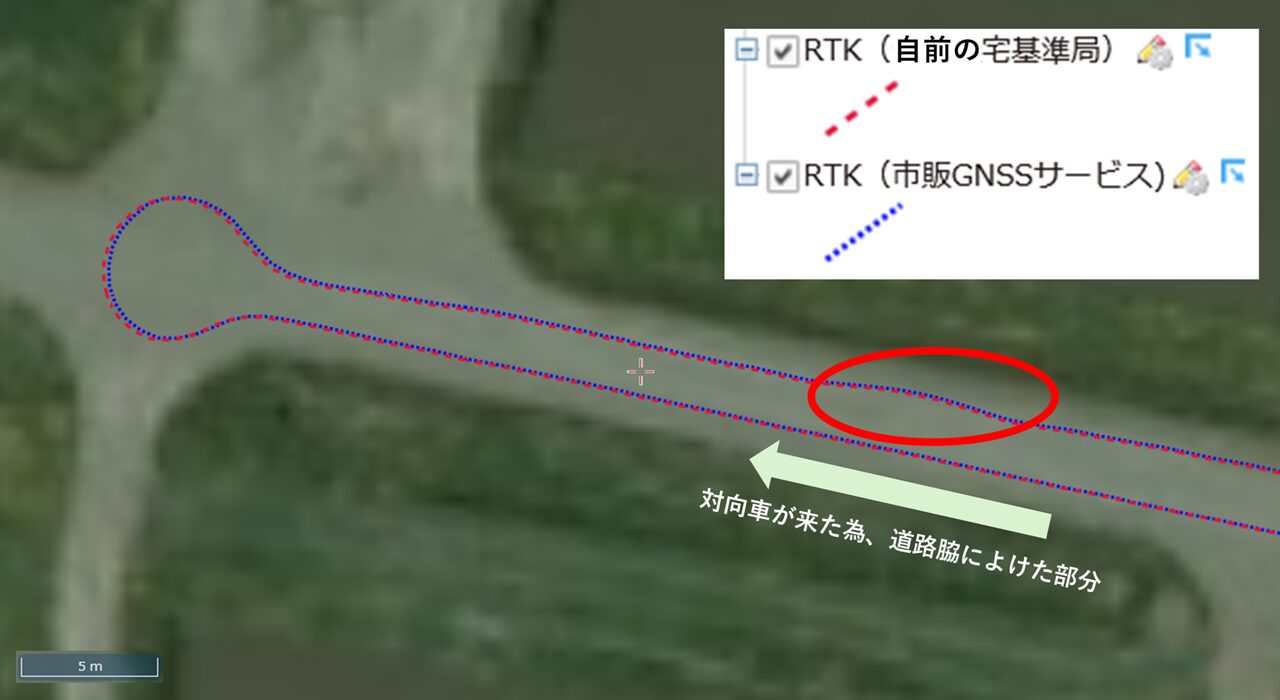
上記の様にトラッキングを行いました。十字路部分で転回をしましたが、特に問題無くトラッキングデータを取得することができているのがわかります。また、赤丸部分で、道路の反対側から対向車が接近してきた為、道路脇によけましたが、その少しの移動もきちんとトラッキングできている事がわかります。
5.終わりに
RTK測量は、リアルタイムで高精度な位置情報を取得できる革新的な技術です。しかし、正確なデータを得るには、基準局の構築やスタティック測量などの専門的な手順が必要となり、導入のハードルが高いのも事実です。
|
RTKの活用事例について詳しく知りたい方はコチラをご覧ください。 |
私たち西部電気工業は、こうした煩雑な作業を代行し、より手軽にRTK測量を活用できる環境を提供します。精度の高いリアルタイム測位を実現し、お客様の業務効率化に貢献できるよう、これからも取り組んでまいります。
更新日:2025.03.25